#include <command_sender.h>
◆ ShooterCommandSender()
| rm_common::ShooterCommandSender::ShooterCommandSender |
( |
ros::NodeHandle & | nh | ) |
|
|
inlineexplicit |
◆ ~ShooterCommandSender()
| rm_common::ShooterCommandSender::~ShooterCommandSender |
( |
| ) |
|
|
inline |
◆ checkError()
| void rm_common::ShooterCommandSender::checkError |
( |
const ros::Time & | time | ) |
|
|
inline |
◆ dropSpeed()
| void rm_common::ShooterCommandSender::dropSpeed |
( |
| ) |
|
|
inline |
◆ getBackWheelSpeedOffset()
| double rm_common::ShooterCommandSender::getBackWheelSpeedOffset |
( |
| ) |
|
|
inline |
◆ getDeployState()
| bool rm_common::ShooterCommandSender::getDeployState |
( |
| ) |
|
|
inline |
◆ getFrontWheelSpeedOffset()
| double rm_common::ShooterCommandSender::getFrontWheelSpeedOffset |
( |
| ) |
|
|
inline |
◆ getShootFrequency()
| uint8_t rm_common::ShooterCommandSender::getShootFrequency |
( |
| ) |
|
|
inline |
◆ getShootMode()
| int rm_common::ShooterCommandSender::getShootMode |
( |
| ) |
|
|
inline |
◆ getSpeed()
| double rm_common::ShooterCommandSender::getSpeed |
( |
| ) |
|
|
inline |
◆ getWheelSpeedDes()
| double rm_common::ShooterCommandSender::getWheelSpeedDes |
( |
| ) |
|
|
inline |
◆ raiseSpeed()
| void rm_common::ShooterCommandSender::raiseSpeed |
( |
| ) |
|
|
inline |
◆ sendCommand()
| void rm_common::ShooterCommandSender::sendCommand |
( |
const ros::Time & | time | ) |
|
|
inlineoverridevirtual |
◆ setArmorType()
| void rm_common::ShooterCommandSender::setArmorType |
( |
uint8_t | armor_type | ) |
|
|
inline |
◆ setDeployState()
| void rm_common::ShooterCommandSender::setDeployState |
( |
bool | flag | ) |
|
|
inline |
◆ setHeroState()
| void rm_common::ShooterCommandSender::setHeroState |
( |
bool | flag | ) |
|
|
inline |
◆ setShootFrequency()
| void rm_common::ShooterCommandSender::setShootFrequency |
( |
uint8_t | mode | ) |
|
|
inline |
◆ setSpeedDesAndWheelSpeedDes()
| void rm_common::ShooterCommandSender::setSpeedDesAndWheelSpeedDes |
( |
| ) |
|
|
inline |
◆ setZero()
| void rm_common::ShooterCommandSender::setZero |
( |
| ) |
|
|
inlineoverridevirtual |
◆ updateGameRobotStatus()
| void rm_common::ShooterCommandSender::updateGameRobotStatus |
( |
const rm_msgs::GameRobotStatus | data | ) |
|
|
inlineoverridevirtual |
◆ updateGimbalDesError()
| void rm_common::ShooterCommandSender::updateGimbalDesError |
( |
const rm_msgs::GimbalDesError & | error | ) |
|
|
inline |
◆ updatePowerHeatData()
| void rm_common::ShooterCommandSender::updatePowerHeatData |
( |
const rm_msgs::PowerHeatData | data | ) |
|
|
inlineoverridevirtual |
◆ updateRefereeStatus()
| void rm_common::ShooterCommandSender::updateRefereeStatus |
( |
bool | status | ) |
|
|
inline |
◆ updateShootBeforehandCmd()
| void rm_common::ShooterCommandSender::updateShootBeforehandCmd |
( |
const rm_msgs::ShootBeforehandCmd & | data | ) |
|
|
inline |
◆ updateShootData()
| void rm_common::ShooterCommandSender::updateShootData |
( |
const rm_msgs::ShootData & | data | ) |
|
|
inline |
◆ updateSuggestFireData()
| void rm_common::ShooterCommandSender::updateSuggestFireData |
( |
const std_msgs::Bool & | data | ) |
|
|
inline |
◆ updateTrackData()
| void rm_common::ShooterCommandSender::updateTrackData |
( |
const rm_msgs::TrackData & | data | ) |
|
|
inline |
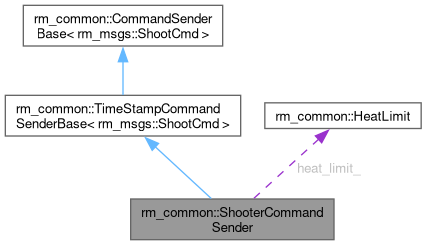
◆ heat_limit_
| HeatLimit* rm_common::ShooterCommandSender::heat_limit_ {} |
The documentation for this class was generated from the following file:

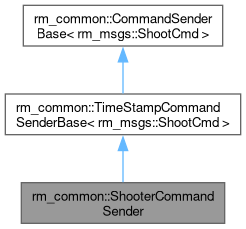
 Public Member Functions inherited from rm_common::TimeStampCommandSenderBase< rm_msgs::ShootCmd >
Public Member Functions inherited from rm_common::TimeStampCommandSenderBase< rm_msgs::ShootCmd >